多模态系列(一)- 介绍
多模态系列(一)- 介绍
Transformer Encoder

上图是早期工作的一个简单总结:
- 图 (a) 是VSE或者VSE++的架构,它们的文本端就是直接抽一个文本特征,但是它们的视觉端非常大,需要的计算量非常多,因为它是一个目标检测器。当得到了文本特征和视觉特征之后,它最后只能做一个很简单的模态之间的交互,从而去做多模态的任务。
- 图(b)是CLIP的结构,视觉端和文本端都用同等复杂度的encoder进行特征提取,再做一个简单的模态交互,结构优点是对检索任务极其有效,因为它可以提前把特征都抽好,接下来直接算Similarity矩阵乘法就可以,极其适合大规模的图像文本的检索,非常具有商业价值。缺点是只计算Cosine Similarity无法做多模态之间深度融合,难一些的任务性能差。
- 图(c)是Oscar或者ViLBERT、Uniter采用的架构,因为对于多模态的任务,最后的模态之间的交互非常重要,只有有了模态之间更深层的交互,VQA、VR、VE这些任务效果才会非常好,所以他们就把最初的简单的点乘的模态之间的交互,变成了一个Transformer的Encoder,或者变成别的更复杂的模型结构去做模态之间的交互,所以这些方法的性能都非常的好,但是随之而来的缺点也很明显:所有的这一系列的工作都用了预训练的目标检测器,再加上这么一个更大的模态融合的部分,模型不论是训练还是部署都非常的困难。
- 图 (d) 是ViLT的架构。当Vision Transformer出来之后,ViLT这篇论文就应运而生了,因为在Vision Transformer里,基于Patch的视觉特征与基于Bounding Box的视觉特征没有太大的区别,它也能做图片分类或者目标检测的任务,因此就可以将这么大的预训练好的目标检测器换成一层Patch Embedding就能去抽取视觉的特征,所以大大的降低了运算复杂度,尤其是在做推理的时候。但是如果文本特征只是简单Tokenize,视觉特征也只是简单的Patch Embedding是远远不够的,所以对于多模态任务,后面的模态融合非常关键,所以ViLT就直接借鉴 © 类里的模态融合的方法,用一个很大的Transformer Encoder去做模态融合,从而达到了还不错的效果。因为移除了预训练的目标检测器,换成了可学习的Patch Embedding Layer。
ViLT的优点:
- 模型极其简单。它虽然是一个多模态学习的框架,但跟NLP的框架没什么区别,就是先Tokenized,然后送到一个Transformer去学习,所以非常的简单易学。
ViLT的缺点:
-
它的性能不够高,ViLT在很多任务上是比不过 © 类里的这些方法的,原因是对于现有的多模态任务,需要更多的视觉能力(可能是由于数据集的bias),因此视觉模型需要比文本模型要大,最后的效果才能好,但是在ViLT里,文本端用的Tokenizer很好,但是Visual Embedding是Random Initialized,所以它的效果就很差
-
ViLT虽然推理时间很快,但它的训练时间非常慢,在非常标准的一个4 million的数据集set上,ViLT需要64张32G的GPU训练三天,它训练的复杂度和训练的时间丝毫不亚于 © 类的方法,所以它只是结构上简化了多模态学习,但训练难度并没有降低。
通过上面的分析可以对模型和LOSS函数的选择有所启发:
1.模型的结构选择:
- 因为有图像的输入和文本的输入,模型应有两个分支分别抽取图像文本特征。
- 在多模态学习里,视觉特征重要性远远要大于这个文本特征,所以应该使用更大更强的视觉模型。
- 多模态学习模态之间的融合也非常关键,因此需要模态融合的模型尽可能大,所以好的多模态学习网络结构应该像 ©,也就是文本编码器比图像编码器小,多模态融合的部分尽可能大。
2.Loss选择:
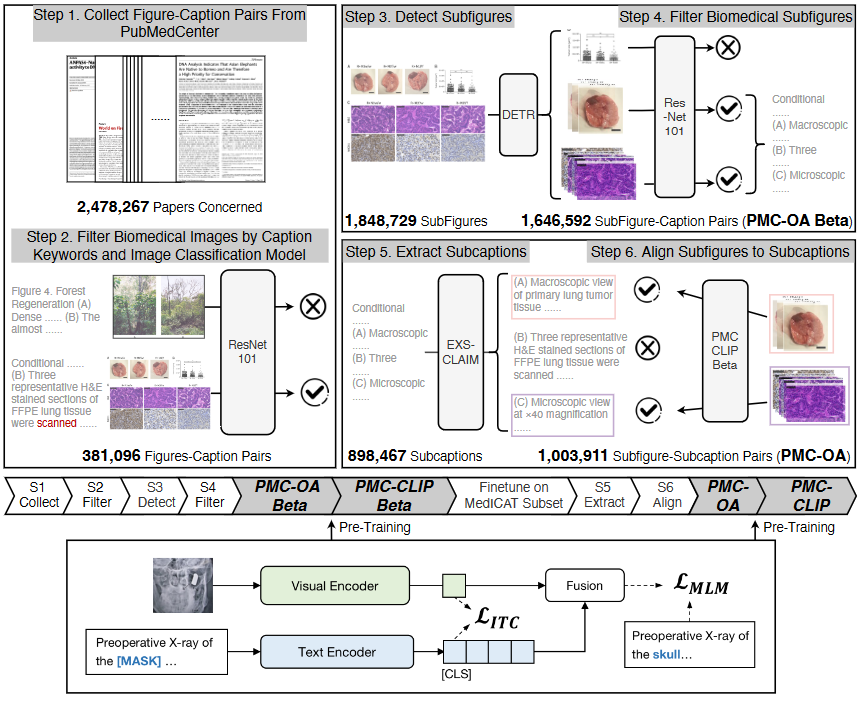
- Image Text Contrastive Loss(ITC):CLIP模型用一个对比学习的ITC Loss训练,效果就很好,而且训练也很高效,建议使用。
- Mask Language Modeling(MLM):BERT的训练方式,遮住一个词然后再去预判这个词(完形填空)。这个Loss非常有用,目前不论NLP还是Vision,都大一统的用Mask Modeling,建议使用
- Image Text Matching Loss(ITM):在之前的 © 和 (d) 方法中都取得了很好的结果,建议使用。
3.Loss不选择WPA:
对于(c) 类的这种方法,使用目标检测,所以使用Word Patch Alignment Loss,就是文本的一个单词和图像上的一个Patch应该有一个对应关系,现在不用目标检测模型,而且在ViLT里WPA Loss计算非常慢,模型训练麻烦,不建议使用。
ViLT
原文链接:[2102.03334] ViLT: Vision-and-Language Transformer Without Convolution or Region Supervision
ViLT: Vision-and-Language Transformer Without Convolution or Region Supervision内容理解-CSDN博客
多模态超详细解读 (二):ViLT:一种极简多模态学习框架 Baseline - 知乎
缺点:
- 性能不够高,很多任务上比不上c类的方法。
因为对于现在的多模态任务而言,有可能是因为数据集的bias,也可能是因为这个任务就需要更多的视觉能力,总之就是需要多更的视觉部分,即视觉部分应该比文本部分要大。在ViLT中文本端采用的很好的tokenizer,视觉embedding确采用的是随机初始化,效果自然就很差
- 尽管推理时间很快,但训练时间非常的慢
在标准的4百万的数据集上,ViLT需要64张32G GPU训练3天。ViLT仅仅在结构上简化了数据集,但其实并没有减少训练成本。
CLIP
对于图像文本匹配和图像文本检索等效果很好
缺点:
- 对视觉问答(VQA),视觉推理(VR),视觉蕴含(VE)性能不够好,仅靠点乘这种多模态交互方式,效果自然不好
ALBEF
原文链接:Align before Fuse: Vision and Language Representation Learning with Momentum Distillation

VLMO
Transformer Encoder+Decoder
- BLIP
- CoCa
- BEIT V3
- PaLI